
微信掃描二維碼,點擊右上角 ··· 按鈕
轉發給朋友或分享到朋友圈

189-2612-1210
顯微成像·洞察微觀之美
Microscopic imaging, insight into the beauty of micro
如何選擇一款合適的顯微鏡相機?
發布時間:2024-11-13
訪問量:573
顯微成像技術現在發展的越來越成熟,這些先進的技術可以幫助我們在不同樣本類型和圖像應用中捕獲到盡可能多的細節,提供了強大的助力,然而,隨著研究越來越復雜,顯微數字圖像檢測系統越來越多樣,我們需要對各種顯微相機的運作方式有基本了解,以便適配并采納最佳解決方案以滿足成像需求。
因此,了解來自樣本的模擬信息是如何被處理成數字圖像以供存儲和展示這一過程的基本概念對于顯微鏡操作者來說較為重要。無論是比較要購買的相機,還是確定實驗室或核心設施中哪個現有的顯微鏡最適合研究需求,都必須理解一些基本要素,選配合適的成像系統,來盡可能的獲取高質量數據。
圖像捕獲方法:
光學顯微鏡的數字成像起點,是感知來自樣本不同區域的光子數量(信號強度)并準確識別光子在樣本中的起始位置,其感知到的到達相機傳感器的信號是模擬格式,而相機必須將該模擬信號轉換為盡可能準確表示模擬信息的數字信號。
對于數字成像,有兩種方法獲取模擬信號強度和位置信息。
第一種是幀圖像捕獲,其中來自目標視場的光線同時投影到傳感器陣列上,陣列中每個傳感器捕獲來自樣本的一小部分信息,這些信息的陣列組合就形成了我們觀測視場的中的圖像
這種方式下,相機同時捕獲了光子信號的強度及其在樣本中的位置。(圖1)
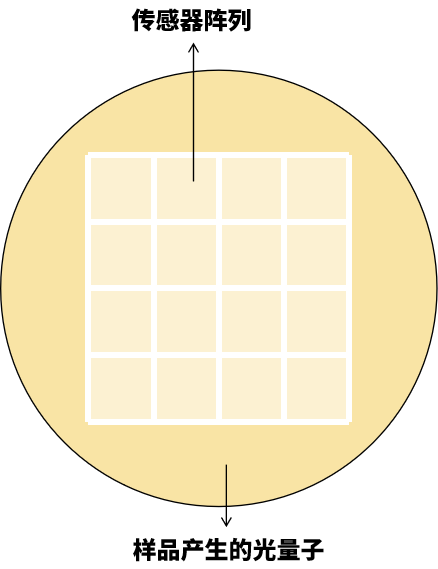
圖1
另一種方法是點掃描圖像捕獲——將光聚焦到樣本的一個小區域并捕獲來自該小區域的信號(圖2)。
在這種方法中,光束通常在樣本上進行光柵掃描以順序獲取所需的視場。在這里,傳感器只捕獲了傳入信號的強度,而其位置信息是從照明光束在樣本上的位置推斷出來的。
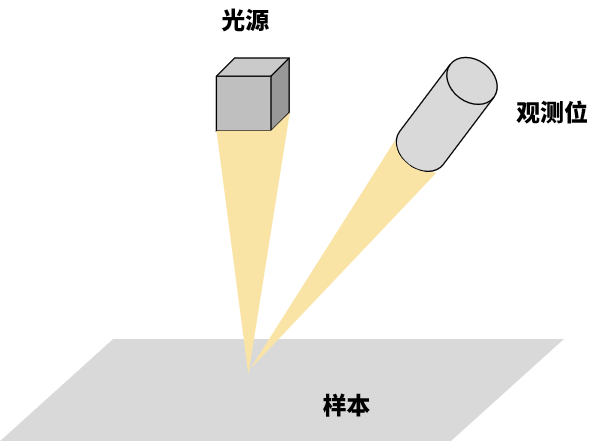
圖2
全幀圖像捕獲:
幀圖像捕獲系統的案例有不同類型的電荷耦合器件(CCD)和科學互補金屬氧化物半導體(sCMOS)相機。
不管是CCD還是sCMOS相機,來自樣本的入射光子擊中光傳感器,其能量被轉換為電子(圖2)。
其產生的電子數量與捕獲的光子信號強度成正比。然后電子被轉換為電壓,由模擬數字轉換器(ADC)讀取并數字化為代表傳入信號強度的灰度值。
然而,在超過一定的光子通量(每單位時間的光子強度)后,傳感器將無法產生額外的電子。
這個值,就是傳感器的滿阱容量,超過這個水平,傳感器就被認為是飽和的。
為了準確測量信號強度,信號必須保持在滿阱容量以下,最理想情況下是將其控制在最小可檢測信號和滿阱容量之間。
在這種類型的圖像捕獲中,單個傳感器的大小決定了圖像中的像素大小(分辨率),傳感器大小必須足夠小,才能捕獲由顯微鏡形成的圖像中最精細的細節。
冷卻CCD是使用傳感器陣列設計的兩種技術中較老的一種。在最簡易的CCD陣列實現中,落在每個傳感器(像素)上的光被轉換為電子。在曝光結束時,存儲在傳感器中的電子信號被順序地逐行轉移到讀出寄存器,然后逐幀放大并轉換為數字值(圖3)。
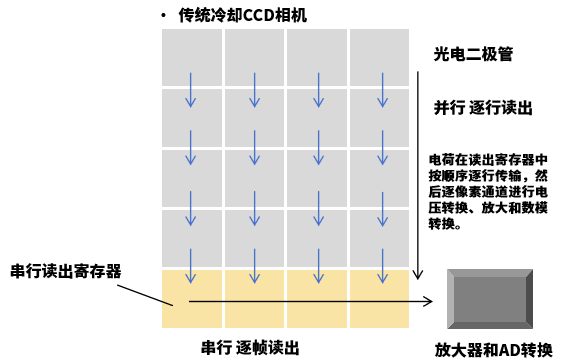
圖3
這個過程需要時間,從而會減緩相機的幀率。
目前已經開發了幾種CCD處理的變體以增加靈敏度。行間冷卻CCD(圖4)是顯微鏡中使用最普遍的CCD類型。
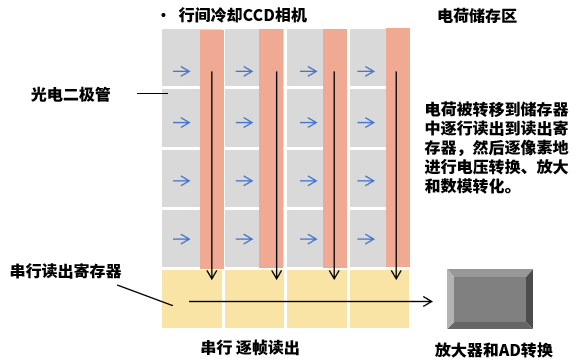
圖4
#在傳統的冷卻CCD相機中,由獨立的傳感器收集的電子被順序地一行一行地傳輸到串行讀出寄存器中。從讀出寄存器,電荷被逐像素讀取,放大,并數字化為二進制灰度值存儲在計算機存儲器中并隨后顯示。在行間CCD中,電荷首先從單個傳感器轉移到存儲寄存器中,然后從那里逐行讀出。這使得傳感器可以更快地開始收集另一個圖像。
對于CCD,像素電荷會被轉移到存儲寄存器中進行讀取,而不是在開始新的曝光之前逐個像素地讀出其值,這樣做釋放了單個傳感器可以去進行新的曝光。雖然這允許更快的周轉,但電荷存儲區域減少了芯片上可用于光收集的區域。目前大多數行間CCD使用微透鏡將入射光聚焦到傳感器區域,這在一定程度上緩解了阻擋光的問題。
盡管CCD在顯微鏡中仍有其用途,但在大多數應用場景下,CCD已被sCMOS系統取代。在CCD陣列中,每個像素的信息通過一個輸出節點、放大器和數字轉換器傳輸,而對于sCMOS相機,像素是并行讀取的(圖5)。
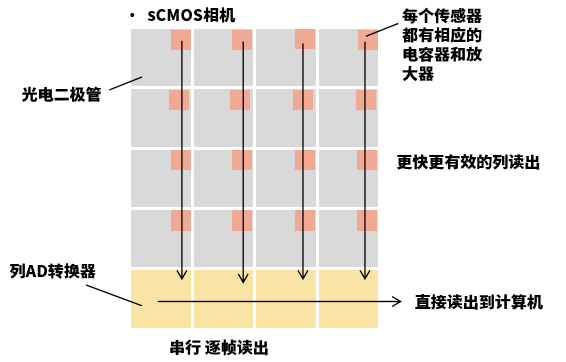
圖5
他的每個傳感器都包含自己的電容器和放大器,每行像素都有自己的ADC。這以更低需求的功率實現了更快、更高效的讀取。
當前sCMOS技術比CCD有許多優勢,包括更寬的視場、更高的量子效率(QE)、更寬的動態范圍、更快的幀率和更好的功率效率。
另外,CCD和sCMOS的量子效率在所有波長上都不是均勻的。了解相機的光譜響應對于數據解釋至關重要,特別是在熒光數據中,必須分離來自密切相關的光的波長的信號。
盡管sCMOS相機相較于CCD有一些優勢,但并不能在所有場景下完全取代。
冷卻CCD比等效的sCMOS系統具有更少的暗電流噪聲,這種噪聲會在長時間曝光下累積,因此對于需要長時間曝光的、信號非常低的樣本,冷卻CCD將具有更好的信噪比閾值。這些類型的樣本包括生物發光研究、熒光素酶報告成像和基于化學還原的熒光。
像素大小影響傳感器的滿阱容量和相關的動態范圍。傳感器的動態范圍計算方式是總滿阱容量除以噪聲水平。因此一個滿阱容量為6000、噪聲水平為2e-的傳感器,將具有3000:1的動態范圍.從黑到白,它可以區分3000個單獨的光子通量水平,并將它們轉換為圖像中的3000個不同的灰度值;一個滿阱容量為34000、噪聲水平為2e-的傳感器將具有17000:1的動態范圍,這個相機相對具有更強大的能力,能夠清晰識別來自樣本不同區域的信號強度的更微妙的差異,使圖像具有更高的對比度分辨率。
點掃描圖像捕獲:
在點掃描圖像捕獲中,樣本被聚焦光束探測,記錄光束與樣本相互作用的信息。激光掃描熒光共聚焦顯微鏡是光顯微鏡中使用的主要點掃描系統。還有其他掃描熒光技術,但這些技術并不廣泛采用。
動態范圍和模擬數字轉換:
動態范圍是一個經常被忽視的選擇相機的重要參數——相機系統還必須將原始動態范圍轉換為數字值,因此,必須了解相機的ADC能力。
大多數現代相機允許在數據收集期間選擇圖像的位深度,這是一個非常有用的特性。例如,12位圖像可以顯示從黑色到白色的全灰度作為4,096(212)個不同的灰度色調,而16位圖像可以存儲和顯示65,536(216)不同的灰度色調。
然而,16位圖像相對文件大小更大,而且讀取速度更慢,如果需要高速成像,應選擇較低的位深度。相反,如果目標是最大化對比度分辨率,特別是對于定量分析,應使用更高的位深度。
除了位深度,還必須考慮相機傳感器能力。如果相機的動態范圍僅為4000:1,那么在超過12位(4,096灰度值)的對象進行數字化純粹是浪費時間和計算機內存的。
熒光顯微鏡的相機要求:
熒光通常比明場的信號更弱,并且由于光毒性和光漂白,它并不適合長曝光時間。因此,選擇一個具有高靈敏度和低噪聲的相機進行熒光顯微鏡檢查是很重要的。
具有低讀取噪聲和低暗電流噪聲的相機是熒光顯微鏡的理想選擇。由于每次捕獲圖像時都會發生讀取噪聲,讀取噪聲越低,可以在不降低圖像質量的情況下使用的增益就越高。這允許更短的曝光時間,這有助于限制暗電流噪聲。暗電流噪聲與溫度和時間有關,通常以給定溫度下的每秒電子數表示。在弱信號的情況下,即使是最好的相機,動態范圍也會縮小。因此確定在典型數據采集條件下產生的動態范圍,將有助于確定在哪個位水平下執行模數轉換。
幸運的是,熒光圖像通常固有地具有較小的動態范圍,較低的動態范圍通常不會對圖像產生不利影響。
事實上,盡管了解了顯微相機的運作模式和評估的關鍵參數,讓我們直接比較相機的數據并得出確切的結論并非易事,因此仍然推薦查看相機的參數后,在實際條件下去進行相機試用測試,來確保能夠得出最佳的效果。
【文章來自MicroscopyEducation
Choosing the Best Camera System for Your Biological Light Microscopy Needs: Part II W. Gray (Jay) Jerome
Pathology, Microbiology and Immunology, Vanderbilt University, Nashville, TN jay.jerome@vumc.org】
免責聲明
本站無法鑒別所上傳圖片、字體或文字內容的版權,如無意中侵犯了哪個權利人的知識產權,請來信或來電告之,本站將立即予以刪除,謝謝。
微信掃描二維碼,點擊右上角 ··· 按鈕
轉發給朋友或分享到朋友圈


